
PID = Proportional - Integral - Differential (比例积分微分)
是历史最悠久,应用最广,适应性最强的控制方法.在工控中 PID 控制算法占到 90%
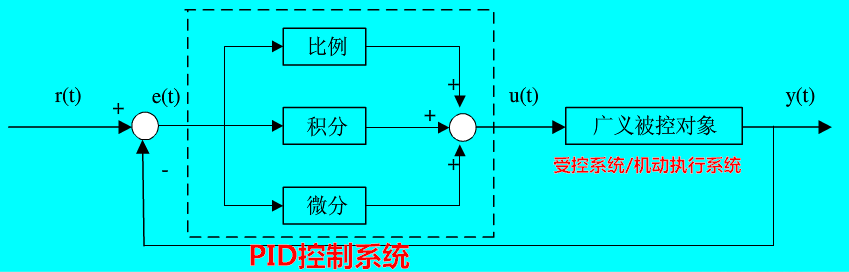
PID 图解模型
PID控制公式:
上式中:
- -- 偏差值/误差值 - – 输入值
- -- 实际输出 - – 比例系数
- -- 积分时间常数 - – 微分时间常数
PID模型分析:
PID控制器的闭环使用上图中模型的工作原理图。
首先,变量 e(t) 代表误差,即输入值 r(t) 和实际输出 y(t) 两者之差。这个误差信号 e(t) 将发送到PID控制系统,该控制器对这个误差信号同时计算导数和积分。即信号 u(t) 将等于比例控制参数乘上误差,积分控制参数 K_I 乘上误差的积分,微分控制系数 K_D 乘上误差的微分。
然后这个信号 u(t) 将被发送到受控系统,得到新输出 y(t) 将获得。这个新的输出将被送回传感器再次找到新的误差信号 e(t) 。再采用这个新的误差信号,并计算其微分及其积分。如此循环往复。
P,I和D控制器的属性
比例控制参数(Kp)加快系统的响应速度,提高系统的调节精度,但从未消除稳态误差。一个积分控制参数(Ki)将消除残差,但它可能使瞬态响应差。一个微分控制参数(Kd)将改善系统的动态性能,减少了过冲,改善瞬态响应的影响。。
传送门: